
Ambarella采用集中式方法颠覆4D成像汽车雷达
Ambarella推出了一种基于边缘的雷达处理的替代方案,正在推出4D汽车成像雷达的集中处理解决方案。2022年12月6日Jeff Child
在一个许多应用程序都将处理转移到边缘的时代,在汽车雷达图像处理中进行集中处理是有充分理由的。正是为了做到这一点,今天,Ambarella推出了业界首个集中式4D成像雷达架构。这里的“4D”是指三个物理维度加上时间。
该解决方案包括该公司在其5 nm CV3 AI域控制SoC上运行的Oculii雷达软件技术。目标应用包括基于人工智能的ADAS(高级驾驶员辅助系统)和L2+至L5自动驾驶系统,以及自动驾驶机器人和无人机。
在这篇文章中,我们比较了汽车中的集中式和边缘雷达处理,我们讨论了Oculii技术的细节,并从对Ambarella的副总裁兼雷达技术总经理Steven Hong的采访中提供了见解。
边缘传感器方法的缺点
正如Hong所解释的,汽车成像雷达数据传统上是在边缘处理的。在这些架构中,雷达传感器的所有处理都位于传感器模块本身内部。洪说:“这确实限制了处理的工作量,因为通常情况下,传感器的功率、尺寸和散热都受到限制。”。
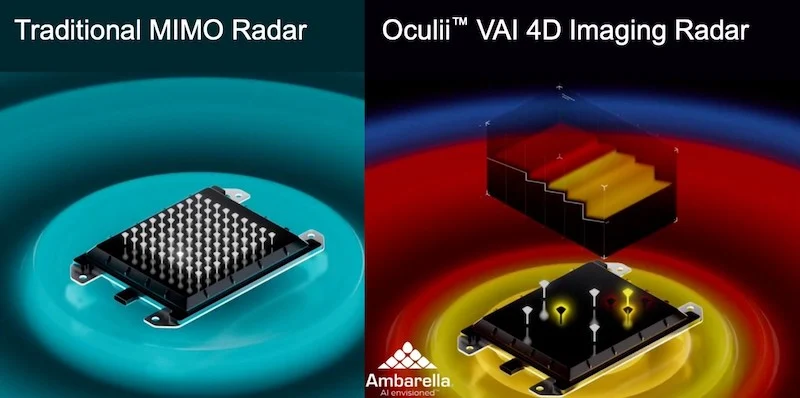
传统的边缘雷达(左)需要数千个MIMO天线,而Oculii VAI雷达(右)使用的天线数量级较少,功耗显著降低。
同时,基于边缘的雷达传感存在一个根本问题,即放大分辨率是有问题的。传统雷达需要更多的MIMO(多输入多输出)天线才能实现更高的分辨率。但对于你添加的每一个天线,你都会生成更多的数据。
“如果你想要一个高分辨率雷达,你通常需要数千个天线,”洪说,“数千个天线转化为你每秒生成的数十兆字节的数据。而这些数据量太大了,无法转移到其他地方。”
根据洪的说法,结果是他所说的雷达设计中正在发生的“非良性循环”,在这种循环中,你不得不将所有的处理都放在模块内。你在该模块中添加的处理和传感越多,你的散热功率就达到了30瓦到50瓦。考虑到这些传感器模块需要放置在车辆上的位置,这尤其是一个问题。
“这是保险杠后面的东西。它位于一个空气静止的地方。因此散热成为一个主要问题。这确实限制了传统雷达架构能够实现的分辨率和性能。”
集中式方法
与边缘雷达方法不同的是,Ambarella凭借其新的集中式模式,使用软件来实现更高的分辨率。洪说:“我们这样做的方式可以让你真正大幅减少天线数量,集中数据,然后使用人工智能软件来补偿我们没有测量到的东西。”。“我们这样做的方式使我们仍然能够实现非常高的分辨率。”
洪说,为了做到这一点,他们在捕捉传感器数据时利用了一个他们称之为“稀疏性”的概念。他说:“我们不是从数千个天线中获取所有数据,而是选择性地进行一些测量。”。“然后,我们使用智能自适应波形来跨时间自适应地补偿和生成信息。这使我们能够有效地将计算能力与实际生成的分辨率相结合。”
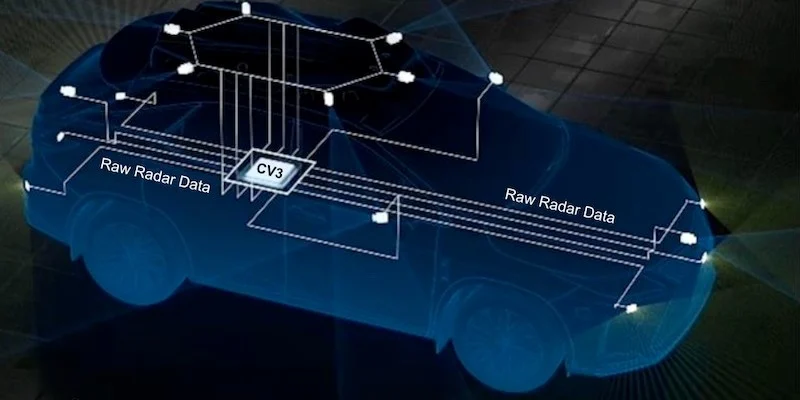
集中式雷达架构方法依赖于在中央CV3 SoC处理器上运行的人工智能软件。
Hong表示,与传统的边缘雷达架构相比,这种集中式方法是一种“良性循环”,因为计算量越多,传感器阵列就越稀疏。“我们的阵列越稀疏,我们生成的数据就越少,我们就越有可能将这些数据集中到一个更强大的计算引擎中,”他说。
Ambarrella的集中式方法实现了0.5度的高角度分辨率,每帧高达10到数千个点的密集点云,以及高达500米的长探测范围。Ambarella提供了一段YouTube视频,展示了其集中式4D成像雷达架构
CV3 SoC上的Oculii软件
Ambarella的4D雷达处理解决方案包括硬件和软件。这包括该公司在其新的CV3 AI域控制器SoC上运行的Oculii雷达软件。Ambarella工程师为其CV3 AI领域控制器SoC系列优化了Oculii算法。
Hong表示,软件定义的集中式架构能够动态分配CV3的处理资源。这可以基于传感器类型之间和相同类型的传感器之间的实时条件来完成。他说:“在远程摄像机数据不可靠的极端降雨条件下,CV3可以重新分配一些资源来改善雷达输入。”。
同样,如果在高速公路上行驶时下雨,CV3处理器可以将注意力放在来自前置雷达传感器的数据上。这扩大了车辆的检测范围,同时提供了更快的反应时间。相比之下,基于边缘的雷达架构不能以这种方式运行,因为在边缘,处理能力是为最坏的情况指定的,因此处理通常不被使用。
CV3 AI域控制SoC建立在5 nm工艺之上,是第一款采用Ambarella下一代CVflow架构的芯片,具有神经矢量处理器和通用矢量处理器,这两种处理器都包括雷达专用信号处理增强功能。(点击图片放大)
据该公司介绍,CV3 SoC标志着第一款采用Ambarella下一代CVflow架构的产品。这包括一个神经向量处理器和一个通用向量处理器。该公司表示,两者都是由安巴雷拉的工程师从头开始设计的,包括雷达特定的信号处理增强功能。
CV3 SoC的处理器协同工作,运行Oculii高级雷达感知软件,其性能远高于传统边缘雷达处理器,高达100倍。集中式方法还带来了其他好处。一种是更容易的空中传送(OTA)软件更新。单个OTA更新可以加载到CV3 SoC,并在系统的所有雷达头上聚合。
同时,由于采用了集中式方法,雷达头不再需要自己的处理器。这减少了成本,包括设计的初始物料清单和事故损坏时的更换。雷达边缘传感器通常放置在车辆保险杠后面,事故问题并非微不足道。
Ambarlla表示,其新的集中式架构将在下个月的CES 2023期间举行的Ambarlla仅限受邀参加的活动中进行展示。
相反的嵌入式处理趋势?
市场机会巨大。根据Yole集团的一份报告,2021年为汽车ADAS制造了约1亿个雷达单元。该报告预测,到2027年,这一数字将增长2.5倍。这归因于对安全的要求更高,以及更先进的驾驶自动化系统上路。Yole Group表示,这包括从目前每辆车1-3个雷达传感器的转变,到原始设备制造商将每辆车5个雷达传感器作为基线。
几年来,我们看到了在边缘进行更多处理的趋势,包括人工智能计算。这一点在物联网(IoT)等市场中尤为明显。Ambarella新的4D雷达传感器处理解决方案也许就是一个例子,在某些情况下,集中式处理架构不仅可以取代边缘方法,还可以为未来的可扩展性提供路线图。也许这个方案将为自动驾驶汽车开辟新的功能。
所有图片均由Ambarella提供