
美国国家航空航天局究竟是如何将DART航天器撞成小行星的?
美国国家航空航天局耗资3.08亿美元的航天器撞上了一颗深空小行星,科学界对这一结果感到非常高兴。2022年9月29日,作者:Aaron Carman
美国国家航空航天局的双小行星重定向测试(DART)航天器在飞行了700多万英里后,成功撞击了小卫星Dimorphos,标志着为期约10个月的任务的结束。美国国家航空航天局行星防御协调办公室(PDCO)报告称,此次任务是评估地球重定向潜在毁灭性外星物体能力的第一个里程碑,为未来的深空侦察任务打开了大门。

DART飞船撞击前2.5分钟,小行星Didymos(左)及其小卫星Dimorphos的图像。图片由美国国家航空航天局/约翰·霍普金斯大学APL提供
DART的真正新颖性直到它的最后四个小时才被观察到。在这一点上,DART被称为“终端阶段”,由于其有效载荷中的电子设备,它开始自我校正自己的轨迹。多个子系统的组合使DART任务取得了成功,本文将对每一个子系统进行更详细的分析。
DRACO:帮助DART密切关注目标
作为此次任务的眼睛,Didymos侦察和小行星光学导航相机(DRACO)是DART航天器上唯一的仪器。顾名思义,DRACO是一种专门的高分辨率相机,旨在向DART提供即时反馈,使航天器能够准确地向Didymos方向移动,并测量这对小行星的尺寸。

DRACO仪器的3D渲染图,具有用于安装到DART有效载荷的结构。图片由约翰斯·霍普金斯应用物理实验室提供
DRACO的图像在有效载荷上进行处理,以帮助在终端阶段进行导航,同时还使用高增益径向线槽天线进行下行链路。由于DRACO的航向修正是为了保存燃料而尽早进行的,因此DRACO的视场很小,只有0.29度,可以大幅放大。尽管视野狭窄,但DRACO一直拍摄到Dimorphos的高质量图像,直到撞击。
智能导航:深空任务的实时控制
DART任务成功的最令人兴奋的部分可能是小型机动自主实时导航(SMART Nav)算法。SMART Nav使用与21岁的PlayStation 1相同的计算能力,在没有人为干预的情况下独立引导DART到达Dimorphos表面。
在DART任务的最后阶段,DART航天器以每秒4英里的速度飞行。光的往返旅行时间约为90秒,这使得DART的地面控制不切实际且效率低下。美国国家航空航天局开发了SMART Nav算法,专门使用机载电子设备实时控制DART航天器。在收到DRACO的图像数据后,SMART Nav不仅探测到了这对小行星,还估计了它的轨迹,这是DART到达Dimorphos的最有效方法。
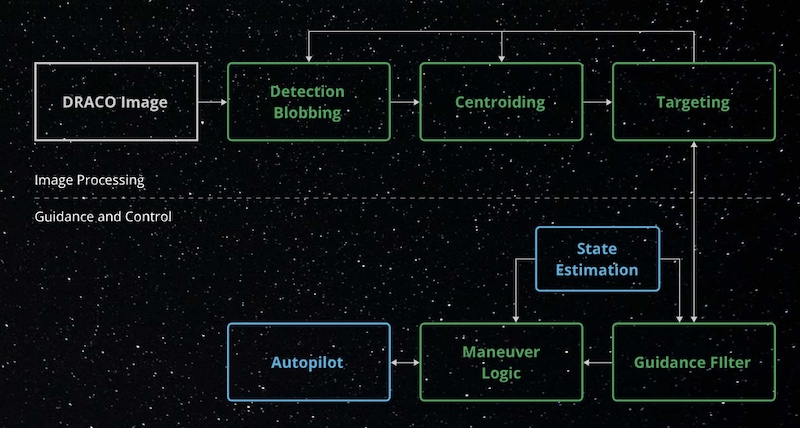
SMART Nav框图用于处理DRACO图像并计算影响Dimorphos的最有效步骤。图片由约翰斯·霍普金斯应用物理实验室提供
SMART Nav背后的真正美妙之处在于,它可以在一个简单、强大的系统中完成多大的任务,而无需任何人工输入。有了更多的计算能力,美国国家航空航天局本可以在DART中实现更先进的导航算法。然而,在没有大气层保护的情况下,宇宙辐射会严重影响电子电路,尤其是随着晶体管数量的增加和尺寸的减小。
ROSA:打破规模和力量之间的权衡
为了连续数月为DART的机载电子设备提供足够的电力,美国国家航空航天局使用了推出太阳能阵列(ROSA)。对于长期任务,为航天器配备太阳能电池板等能量收集设备通常比携带某种形式的能量存储更节能。然而,传统的太阳能设备体积大、坚固,如果没有人为干预,就无法轻易部署。ROSA在发射和能源效率方面实现了更好的折衷,同时为每个阵列提供高达30kW的功率。
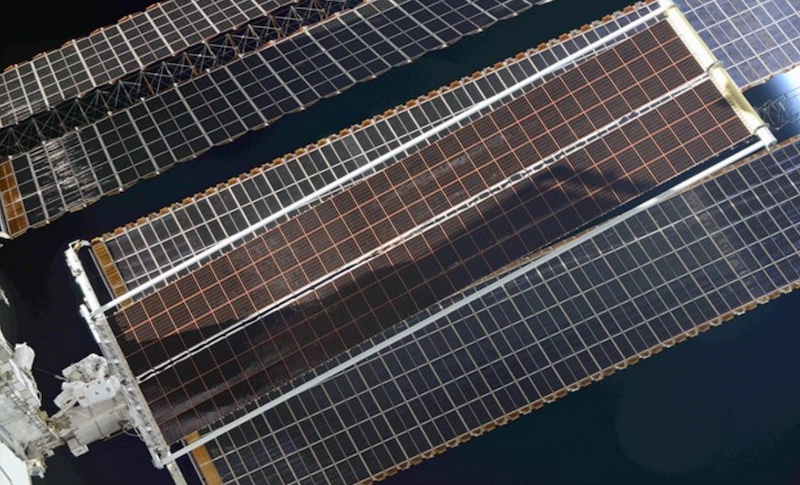
在航天器上部署后的ROSA系统。图片由Redwire提供
发射时,ROSA的太阳能电池像地毯一样卷在有效载荷内,以便于运输。一旦发射完成,ROSA就开始部署。在部署过程中,复合材料吊杆结构从有效载荷被动延伸,与它们一起延伸太阳能电池,以提供用于能量收集的宽横截面积。复合材料吊杆不需要部署电机,而是利用复合材料本身储存的应变能来扩展太阳能电池,进一步减少系统中的故障点数量。
ROSA已经安装在国际空间站(称为iROSA)上,未来将集成集中器等太阳能技术。
行星防御的未来
让DART到达Dimorphos只是PDCO的第一步。DART任务成功后,全球各地的许多团队正在观察这对小行星,以帮助确定DART在改变小卫星轨道方面的有效性,并为未来的行星防御任务生成模型。
DART的伴星LICIACube(意大利轻型立方体小行星成像卫星)在撞击前15天与DART分离,已经在DART碰撞后生成了小行星的图像。
DART任务不仅验证了其子系统在深空旅行中的有效性,还展示了美国国家航空航天局的科学家如何保护地球免受灾难性碰撞的影响。