
“Wi-Fi传感器”帮助机器人绘制室内环境地图
UCSD的研究为同时定位和映射(SLAM)提供了一种新的方法。2022年5月31日,杰克·赫兹
机器人技术中一个臭名昭著的工程挑战是同时定位和映射(SLAM)。SLAM指的是机器人在定位环境的同时绘制环境地图的能力。
为了实现SLAM,开发人员经常使用各种硬件、软件和计算机科学技术。本周,加州大学圣地亚哥分校的研究人员发表了一篇论文,他们在论文中描述了一种使用Wi-Fi信号作为归航信标的SLAM新方法。
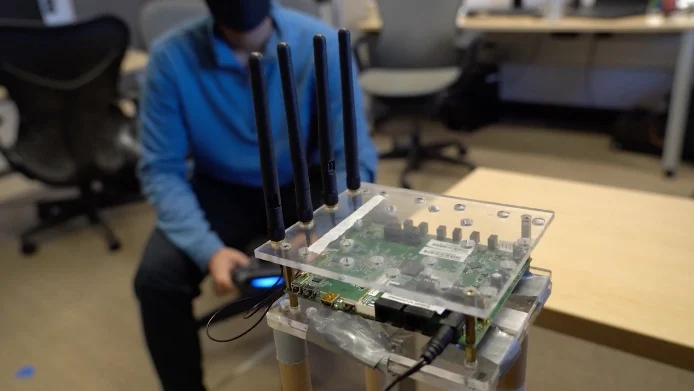
研究人员认为,Wi-Fi传感有可能取代激光雷达传感器,并补充其他低成本的室内定位相机。屏幕截图由加州大学可持续发展学院提供
在这篇文章中,我们将提供SLAM的一些背景知识,并讨论UCSD研究人员提出的这种新方法是如何在映射技术上产生有趣的变化的。
SLAM是如何工作的?
为了让机器人引导自己穿过一个环境,他们必须首先了解自己的环境及其在其中的位置。使用SLAM,机器人在实时穿越环境时会构建一张环境地图,同时也会了解其在地图中的位置。
SLAM的目标是绘制和了解机器人在环境中的位置。来自Siftrobot的图像
测绘通常是通过视觉硬件解决方案实现的,如激光雷达、相机和雷达。当使用雷达和激光雷达时,机器人依赖于飞行时间数据,在这些数据中,机器人将通过发送激光脉冲和计算脉冲反射的往返时间来绘制环境图。基于相机的解决方案使用计算机视觉和统计方法来分析帧,并了解对象在环境中的深度和位置。
另一方面,定位是通过统计方法实现的,通常是通过获取地图内的数据点并使用五点算法等算法来估计位置。
SLAM面临许多障碍
然而,由于各种环境和硬件限制,SLAM在实践中很难实现。正如All About Circuits撰稿人Nicholas St.John所写,视觉SLAM的方法通常受到现实世界中存在的动态环境的限制。
例如,虽然相机是一种低成本的硬件解决方案,可以提供丰富的背景地图和位置估计,但在光线不足或同质的环境中,它们不会产生有用的数据。同样,激光雷达可以提供对眩光和同质环境的免疫力,但在长走廊等环境中,它们可能会受到范围的限制。
这些限制可能会使机器人难以或不可能创建其环境的3D地图,从而使SLAM无法实现,自主性也不可行。由于无法控制现实世界应用程序中的所有环境,研究人员必须为SLAM寻找其他3D映射方法。
加州大学可持续发展学院设计使用Wi-Fi进行地图绘制
本周,加州大学可持续发展学院的研究人员发表了一篇论文,他们在论文中描述了一种名为P2SLAM的SLAM新方法。
P2SLAM通过Wi-Fi与本地接入点进行通信。机器人配备了Wi-Fi传感器,可以来回发送和接收Wi-Fi信号。在初始化时,机器人会呼叫本地Wi-Fi接入点,等待回复,就像马可波罗的游戏一样。机器人将解释Wi-Fi信号的独特物理特性,如到达角和直接路径长度,以解释机器人相对于接入点的位置。随着这一过程的继续,机器人会收集更多关于其环境及其位置的信息,直到形成完整的图像。
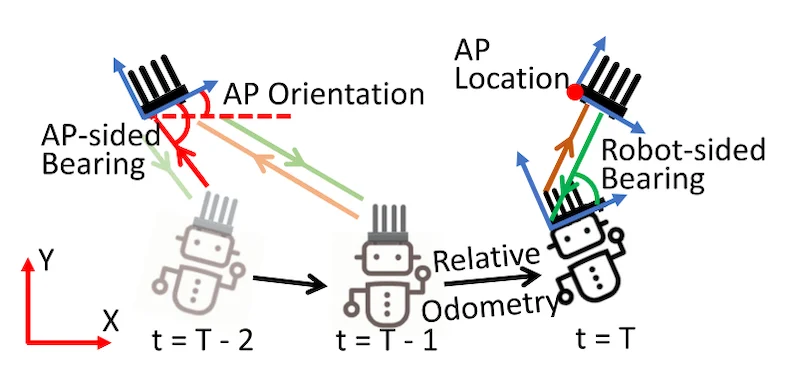
P2SLAM使用具有Wi-Fi信号的相对里程计来执行SLAM。图片来自Arun等人。
根据研究人员的说法,这种方法的一个显著好处是P2SLAM不是一种基于视觉的SLAM。因此,它不会受到环境限制,例如较差的照明和均匀性。此外,Wi-Fi信号存在于大多数家庭和商业环境中,这使得这种方法在大多数地方基本上是免费使用和可访问的。
与激光雷达的可比结果
研究人员在一栋包括多个接入点的商业建筑中测试了他们独特的基于Wi-Fi的SLAM技术。在那里,该团队为机器人配备了Wi-Fi传感器、激光雷达和相机,以比较这三种技术是如何映射环境的。
机器人在地板上绕了几圈,包括明亮和昏暗的空间、狭长的走廊和几个角落,研究人员发现,来自Wi-Fi传感器的地图绘制和定位数据与来自激光雷达传感器和商用相机的数据一样准确。

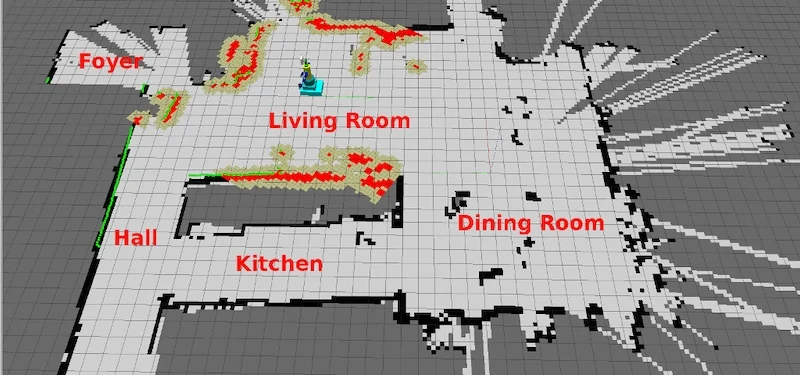
P2SLAM在办公室导航。屏幕截图由加州大学可持续发展学院提供
这项研究(虽然显示出了希望)是同类研究中的第一项,在P2SLAM概念验证能够在生产中实施之前,必须回答更多的问题。