
绘制月球地图美国国家航空航天局宣布推出基于激光雷达的月球背包
重点又回到了月球上,美国国家航空航天局在Aeva的激光雷达技术的支持下,制作了一个背包来帮助绘制月球地图。2022年4月28日,杰克·赫兹
太空探索是一个在历史上催化了许多革命性技术的领域。我们日常生活中的主要技术,如LED和便携式计算机,今天的存在只是因为对太空旅行和探索的投资。
随着美国国家航空航天局着眼于让人类重返月球,发明和创新的历史趋势仍在继续。最近,美国国家航空航天局宣布,与美国航空航天局合作,成功设计了一种基于激光雷达的“月球背包”,用于绘制月球表面地图。

美国国家航空航天局的背包原型正在测试中。图片由NASA和Michael Zanetti提供
本文将讨论Aeva的激光雷达提供的一些独特技术,以及NASA的新型月球背包是如何工作的。
3D激光雷达与太空挑战
在大多数情况下,当人们谈论激光雷达时,他们可能指的是3D激光雷达,它用于自动驾驶汽车和机器人等应用。
大多数3D激光雷达系统使用飞行时间(ToF)原理工作,其中传感器可以根据入射光子在传输后反射和返回所需的总时间来解释物体与光源的距离。
3D激光雷达的结果数据是仅三维(即X、Y和Z)的环境图。
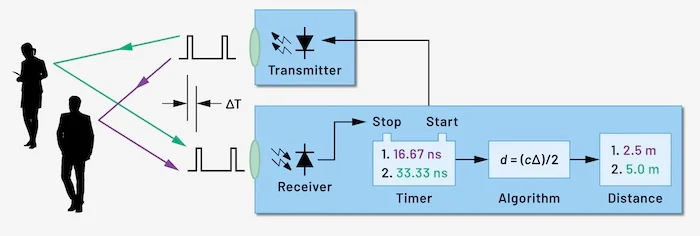
ToF激光雷达的工作原理。图像由Analog Devices提供
3D激光雷达虽然功能强大,但也有一些缺点,可能会阻碍其在太空应用中的应用。
一个这样的挑战是,为了使3D激光雷达系统能够创建其环境的3D地图,系统必须依靠惯性测量单元(IMU)和GPS等外部传感器来在地图中定位自己。这一要求在车辆等地面应用中可能不是问题,但在月球等全球导航卫星系统受限的环境中,这可能会受到严重限制。
带FMCW的4D激光雷达
为了解决3D激光雷达的缺点,许多人转向调频连续波(FMCW)激光雷达作为解决方案。FMCW激光雷达摒弃了传统的ToF方法,而是通过发射连续激光脉冲并在频率上重复啁啾来测量距离。
其概念是,啁啾的上升时间比光到达入射物体所需的时间长。因此,当反射信号返回时,工程师可以判断反射光往返于物体时频率发生了多大变化。
将该间隔乘以线性调频速度得到距离。
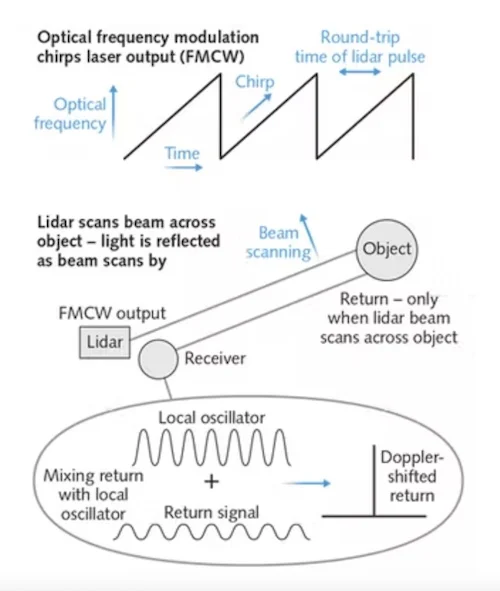
4D激光雷达的工作原理。图片由Laser Focus World提供
更重要的是,工程师可以进一步处理数据,提取物体的多普勒频移。由此可以确定被测物体相对于激光雷达的速度。
与ToF方法相比,这种能力提高了精度和分辨率。由于这个第四维度,FMCW也被称为4D激光雷达。
值得注意的是,速度数据的添加允许4D激光雷达提供更好、更准确的环境地图,并且允许激光雷达在3D地图中定位自己,而不需要IMU或GPS。
美国国家航空航天局的月球背包KNaCK
如前所述,美国国家航空航天局最近宣布,它开发了一种新的月球背包系统,用于绘制月球上车辆和宇航员的地图和定位。
创建一种在月球上绘制和定位宇航员的设备的核心挑战是,月球表面没有GPS或GNSS服务。相反,美国国家航空航天局需要一种不同的技术来完成这项工作。该解决方案产生了最新的设备,运动学导航和制图背包(KNaCK)。
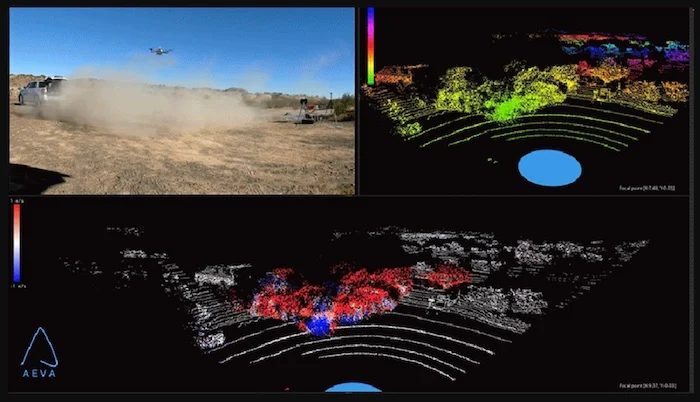
美国国家航空航天局的KNaCK技术与无人机一起使用。图片由NASA和Michael Zanetti提供
自然,KNaCK的基本底层技术是Aeva的FMCW 4D激光雷达技术。由此产生的传感器是一种用于导航和科学测绘的背包测量工具,能够生成高分辨率的3D地图,并结合地图中物体相对于KNaCK的速度信息。
通过这种方式,KNaCK可以让漫游者和宇航员了解他们在地图中的相对位置,这对于确保月球表面的安全是必要的。
目前,原型机重约40磅,但美国国家航空航天局未来的项目计划包括小型化,使其更便宜、更容易佩戴。如果一切顺利,美国国家航空航天局希望KNaCK能在不久的将来用于未来的太空任务。