
提高精密RTD温度测量解决方案中的EMC性能
精密温度测量系统的设计注意事项,以及如何在保持测量精度的同时提高系统的EMC性能。 您想知道如何设计一个具有高电磁兼容性(EMC)性能的精密温度测量系统吗?本文将讨论精密温度测量系统的设计注意事项,以及如何在保持测量精度的同时提高系统的EM...
精密温度测量系统的设计注意事项,以及如何在保持测量精度的同时提高系统的EMC性能。
您想知道如何设计一个具有高电磁兼容性(EMC)性能的精密温度测量系统吗?本文将讨论精密温度测量系统的设计注意事项,以及如何在保持测量精度的同时提高系统的EMC性能。我们将以RTD温度测量为例,介绍测试结果和数据分析,使我们能够轻松地从概念转移到原型,从概念转移至市场。
精密温度测量和EMC挑战
温度测量是模拟世界中已知的最常用的传感技术之一。许多测量技术可用于感测环境温度。热敏电阻是一种小型、简单的二线制器件,具有快速响应时间,但其非线性和有限的温度范围限制了其精度和应用。电阻式温度检测器是最稳定、最准确的温度测量方法。RTD设计的困难在于它需要外部激励、复杂的电路和校准工作。没有开发温度测量系统经验的工程师可能会受到劝阻。热电偶(TC)可以提供一种具有不同范围的坚固、廉价的解决方案,但冷端补偿(CJC)对于一个完整的系统是必要的。与热敏电阻、TC和RTD相比,新开发的数字温度传感器可以直接通过数字接口提供校准的温度数据。精确的温度测量需要高精度的温度传感器和精确的信号链来形成温度测量系统。TC、RTD和数字温度传感器具有最高的精度。精确的信号链设备是可用的,可以用来收集这些传感器信号并将其转换为绝对温度。在工业领域,我们的目标是达到0.1°C的精度。此精度测量不包括传感器误差。表1显示了不同温度传感器类型的比较。
表1。不同类型温度传感器的比较
温度
传感器类型
赞成的意见
欺骗
热敏电阻
简单的2线制实现,响应时间快,体积小
非线性、有限的温度范围,不像TC和RTD那样坚固,需要刺激,由于自加热而出现不准确
实时数据处理
最稳定、最准确、坚固、易于连接和实施
需要外部刺激,非线性,由于自身发热而出现不准确
热电偶
坚固耐用、自供电、价格低廉,支持各种范围(J、K、T、E、R、S、B、N),
适合远距离
非线性,需要冷端补偿(CJC),低输出范围需要低噪声/低漂移电子设备,精度为1%至3%
IC温度传感器
完全校准、线性、稳定、模拟和数字输出
有限的温度范围
在创建数字温度测量系统时,特别是对于工业和铁路等恶劣环境中的应用,不仅要考虑精度和设计难度,还要考虑EMC性能是保持系统稳定的关键特性。该系统需要额外的电路和分立组件来提高EMC性能。然而,更多的保护组件意味着更多的错误源。因此,设计一种具有高传感精度和高EMC性能的温度测量系统是非常具有挑战性的。温度测量系统的电磁兼容性性能决定了它能否在特定的电磁环境中正常工作。
ADI提供各种温度测量解决方案,如精密模数转换器(ADC)、模拟前端(AFE)、IC温度传感器等。ADI AFE解决方案提供多传感器高精度数字温度测量系统,用于直接TC测量、直接RTD测量、直接热敏电阻测量,并支持自定义传感器应用。一些特殊配置可以在添加EMC保护组件的同时帮助保持高测量精度。图1显示了经典的比率式温度测量电路和方程。

<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_fig-01.jpg" alt="">
图1。经典的比率式温度测量电路和方程式。
以下部分介绍了温度传感解决方案,供系统设计者实现最佳EMC性能。
RTD温度测量解决方案
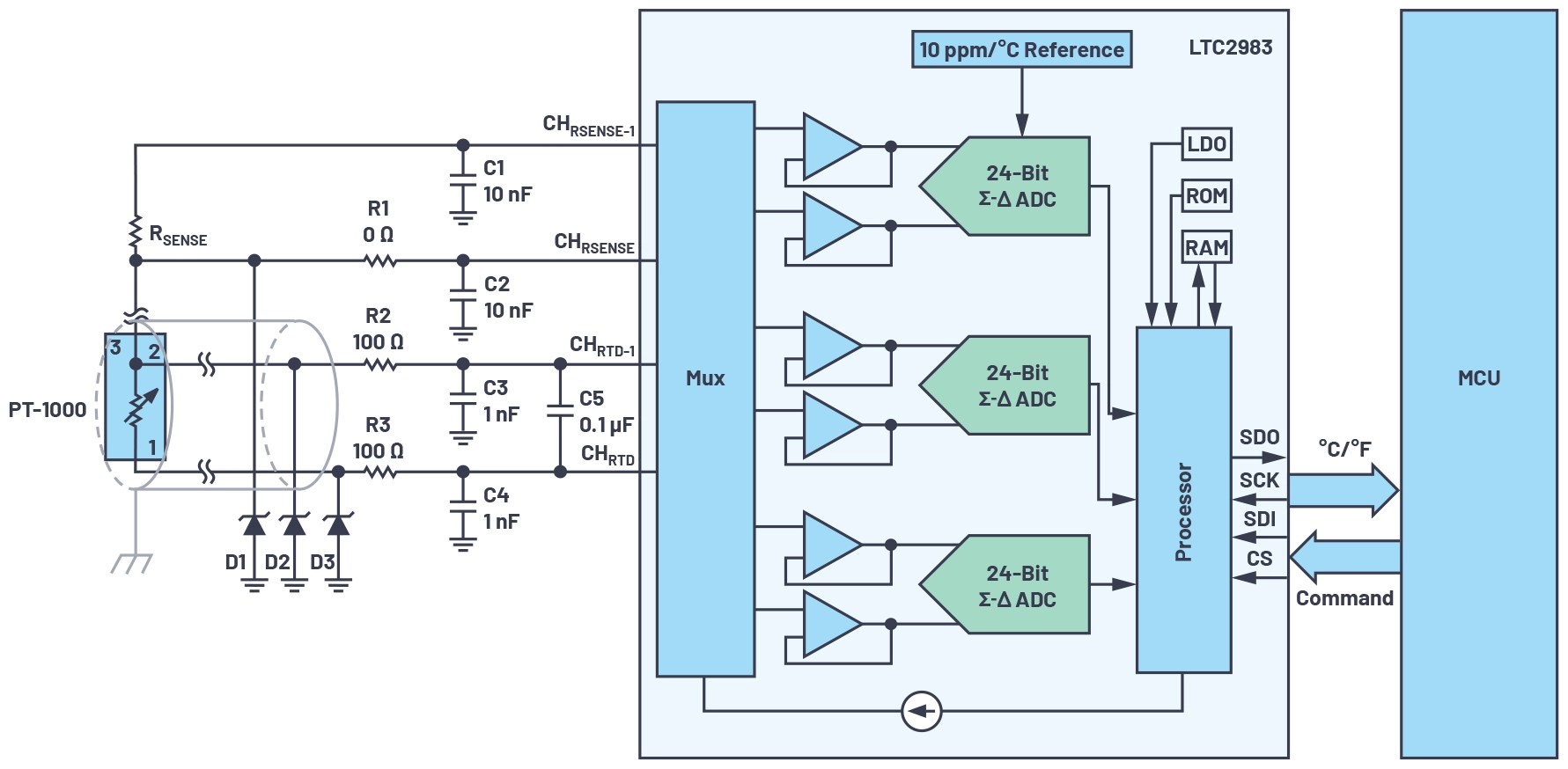
拿着LTC2983型以温度测量AFE为例。系统控制器可以通过SPI接口直接从LTC2983读取校准后的温度数据,精度为0.1°C,分辨率为0.001°C。当连接4线RTD时,励磁电流旋转功能可以自动消除热电偶的寄生效应,减少信号电路漏电流的影响。基于这些功能,LTC2983可以加快多通道精密温度测量系统的设计,并在不需要复杂电路设计的情况下实现高EMC性能,让您和您的客户更有信心。图2显示了受EMC保护的LTC2983温度测量系统框图。
<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_fig-02.jpg" alt="">
图2:EMC保护的LTC2983温度测量系统。
RTD无疑是高精度温度测量的最佳选择,可以测量–200°C至+800°C的温度。100Ω和1000Ω铂电阻式温度检测器是最常见的,但它们也可以由镍或铜制成。
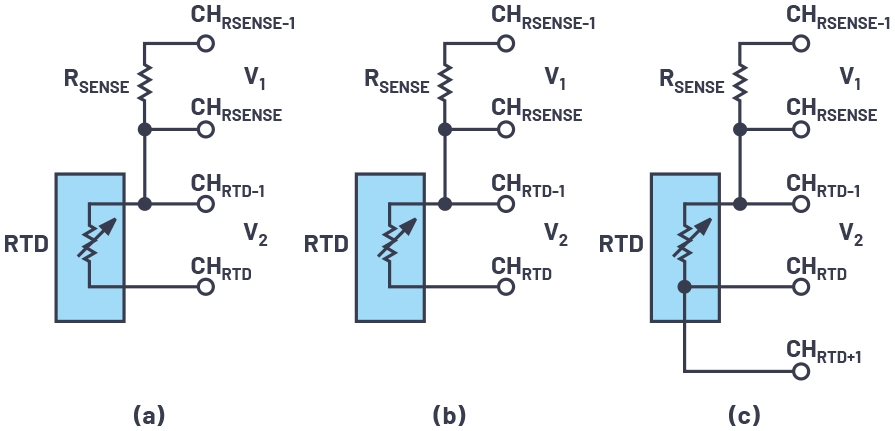
最简单的RTD温度测量系统是2线配置,但引线电阻会引入额外的系统温度误差。三线配置可以通过向RTD施加两个匹配的电流源来消除引线电阻误差,但引线电阻应该相等。Kelvin配置或4线配置可以通过使用高阻抗Kelvin传感直接测量传感器两端来消除平衡或不平衡的引线电阻。然而,成本将是4线配置的主要限制,因为它需要更多的电缆,尤其是用于远程温度测量。图3显示了不同的电阻式温度检测器导线配置。[1] 考虑到真实的客户使用案例,本文选择了3线RTD配置并测试了其EMC性能。
<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_fig-03.jpg" alt="">
图3。不同的RTD导线配置:(a)2线、(b)3线和(c)4线。
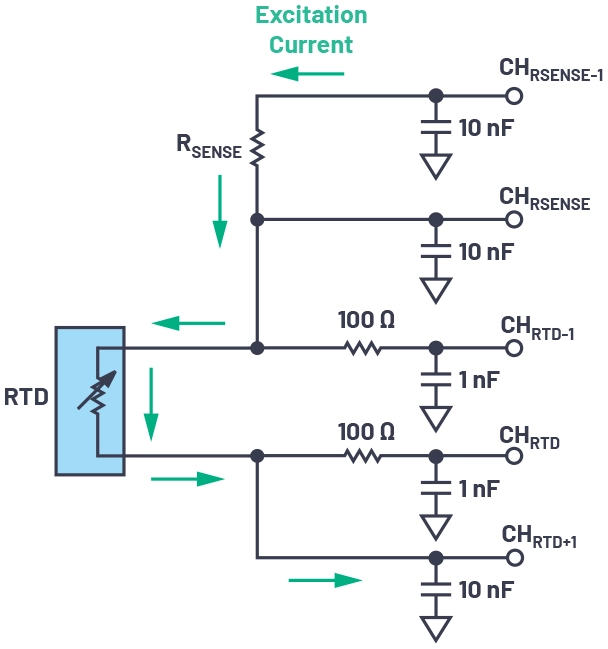
2线和3线RTD传感器也可以在PCB上使用Kelvin配置。当我们需要在信号链路上添加限流电阻器和RC滤波器来保护设备的模拟输入引脚时,这些额外的电阻将引入大的系统偏移。例如,用4线Kelvin配置替换2线保护电路可以帮助消除这种偏移,因为励磁电流不会流过这些限制电阻器和RC滤波器,并且由保护电阻引起的误差可以忽略不计(见图4)。请参阅LTC1986数据表了解更多详细信息。
<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_fig-04.jpg" alt="">
图4。4线配置消除了额外的电阻器错误。
温度测量系统的鲁棒性挑战是什么?
与大多数温度测量IC一样,LTC2983可以耐受超过2 kV的HBM ESD水平。但在工业自动化、铁路和其他恶劣的电磁环境中,电子设备需要面临更高的干扰水平和更复杂的EMC事件,如静电放电(ESD)、电快速瞬变(EFT)、辐射敏感度(RS)、传导敏感度(CS)和浪涌。
额外的离散保护组件是必要的,以降低对下游设备的损坏风险并提高系统的鲁棒性。
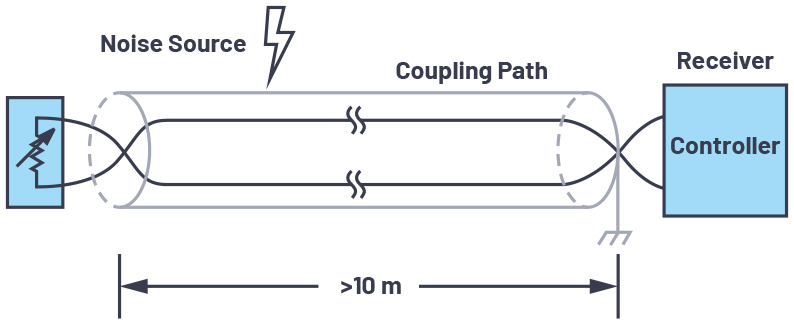
EMC事件的三个要素是噪声源、耦合路径和接收器。如图5所示,在这个温度测量系统中,噪声源来自周围环境。耦合路径是传感器电缆,LTC2983是接收器。工业自动化和铁路应用总是使用长传感器电缆来感测远程设备的温度。传感器电缆的长度可以是几米,甚至几十米。更长的电缆将导致更大的耦合路径,温度测量系统将面临更严重的EMI挑战。
<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_fig-05.jpg" alt="">
图5。温度测量系统的EMI事件的三个要素。
带TVS的系统级保护解决方案
瞬态电压抑制器(TVS)和限流电阻器是最常见的保护部件。选择合适的TVS和限流电阻器不仅可以提高系统的鲁棒性,而且可以保持系统的高测量性能。表2显示了TVS器件的关键参数,包括工作峰值反向电压、击穿电压、最大箝位电压和最大反向泄漏。工作峰值反向电压必须高于最大传感器信号,以确保系统正常工作。击穿电压不应比信号电压大很多,以避免产生宽的、无保护的电压范围。最大箝位电压决定了TVS可以抑制的最大干扰信号电压。反向泄漏会对系统的测量误差产生很大影响,因此应选择反向泄漏最小的TVS。
表2。TVS关键参数
参数
描述
工作峰值反向电压
低于该电压
没有发生明显的传导
击穿电压
电压
触发指定的传导
最大箝位电压
设备两端的最大电压
当传导规定的最大电流时
最大反向泄漏
最大电压时的泄漏电流
在触发导通之前施加到TVS
在正常操作条件下,TVS设备似乎对地具有高阻抗。当大于TVS击穿电压的瞬态电压被施加到系统的输入端时,一旦TVS击穿,输入端的电压就被箝位,并提供到地的低阻抗路径,将瞬态电流从输入端转移到地。
如图2所示,这是一个3线PT-1000保护电路。三线PT-1000通过三个相邻通道连接到LTC2983,这些通道由SMAJ5.0A TVS和100Ω限流电阻器保护。限流电阻器和下游电容器形成低通滤波器,以从输入线路中去除尽可能多的RF分量,保持每条线路和地之间的AC信号平衡,并在测量带宽上保持足够高的输入阻抗,以避免加载信号源。[2] 差模滤波器–3 dB带宽为7.9 kHz,共模滤波器–3分贝带宽为1.6 MHz。
该温度测量系统按照IEC 61000-4-2、IEC 61000-4-3、IEC 610004-4、IEC 61000-4-5和IEC 61000-4-6标准进行了测试。在这些测试下,系统必须正常工作,并提供精确的温度测量。被测传感器为B级3线PT-1000,使用长度约10m的屏蔽线。
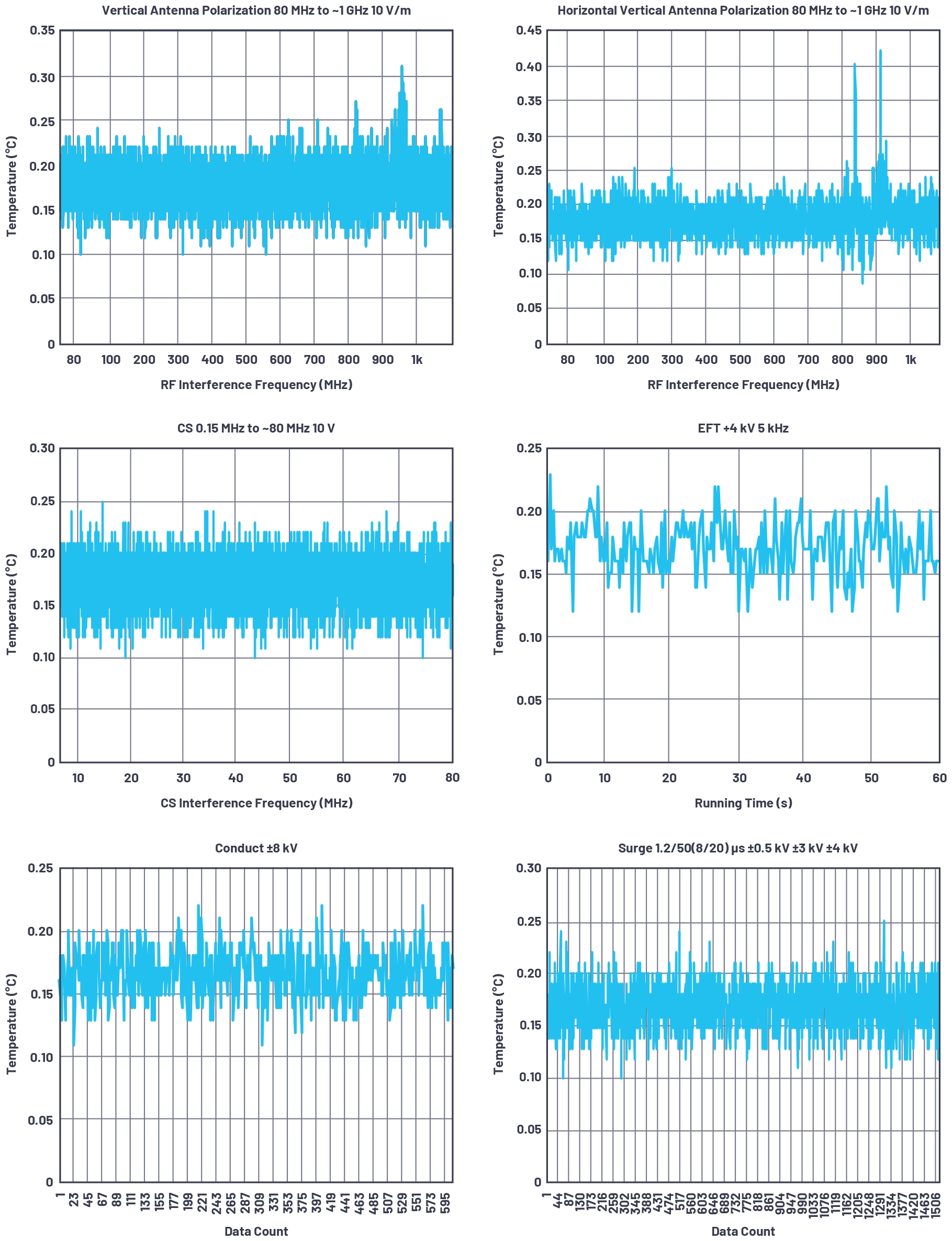
表3列出了IEC 61000-4-x抗扰度测试项目、测试水平以及系统受到EMI事件干扰时的温度波动。图6显示了测试时的输出温度数据曲线,对应于表3中的最大温度波动。
表3。EMI测试结果
国际电工委员会61000-4
转瞬即逝的
防护等级
最高温度
波动(°C)
无线电
10伏/米、80兆赫至~1千兆赫,
和1.4千兆赫至约2千兆赫
<0.5
反恐精英
10伏,0.15兆赫至~80兆赫
<0.2
静电放电
±8 kV,传导;±15 kV,空气
<0.15
EFT公司
±4千伏,5千赫兹
<0.15
激增
±4 kV,1.2/50(8/20)μs
<0.2
保护后的温度测量精度
TVS和限流电阻器有助于保护温度测量系统免受EMC的影响。具有尽可能低的箝位电压的TVS可以更好地保护敏感电路。但它们反过来又会给系统带来错误。为了应对这种情况,我们必须使用具有更高击穿电压的TVS,因为更高的击穿电压意味着在正常工作电压下有更少的漏电流。TVS较低的电流泄漏导致添加到系统中的误差较少。
<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_fig-06.jpg" alt="">
图6。测试时输出温度数据曲线。
表4。Littelfuse SMAJ5.0A TVS的电气特性

<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_tab-01.jpg" alt="">
考虑到这些因素,我们使用了Littelfuse SMAJ5.0A TVS(可在大多数电子元件分销商处购买)和100Ω限流电阻器,精度为±0.1%,以保护系统并避免插入任何显著的测量误差。
为了实现高测量精度,我们使用精密电阻矩阵来代替PT-1000传感器,并模拟温度变化。此精密电阻矩阵已使用Keysight Technologies 3458A万用表进行校准。
为了缓解消除匹配引线电阻误差的困难,我们使用4线配置来评估系统的精度性能。这更有利于消除传感器误差。
为了更准确地计算系统误差,我们需要使用与LTC2983相同的标准将电阻值转换为温度。传感器制造商发布的温度查找表是最准确的转换方法。然而,将每个温度点写入处理器的内存是不明智的。因此,我们使用以下公式来计算温度结果。[3]
当T>0°C时,方程式为:

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-01.jpg">
计算电阻值对应的温度:

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-02.jpg">
当T≤0°C时,方程为:

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-03.jpg">
温度通过多项式拟合获得:

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-04.jpg">
哪里:
T是RTD温度,°C。
R实时数据处理(T) 是电阻式温度检测器电阻,Ω。
R0是0°C时的电阻式温度检测器电阻,R0= 1000 Ω.
A=3.9083×10–3
B=–5.775×10–7
C=–4.183×10–12
图7显示,在-134°C至+607°C的温度范围内,总系统误差不超过±0.4°C。

<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_fig-07.jpg" alt="">
图7。系统错误与温度。
图9显示了LTC2983对RTD温度测量的误差贡献,与图9相比,额外的保护部件增加了约±0.3°C的系统误差,尤其是TVS泄漏电流。我们可以看到,随着温度的升高,系统误差也会增加。这就是TVS的I-V曲线特性的用武之地。
系统误差可通过以下方式计算:

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-05.jpg">
哪里:
T错误是LTC2983温度测量系统的总输出误差,°C。
Tcal是通过精密电阻器计算的温度,该电阻器已使用Keysight Technologies 3458A进行校准,°C。
TLTC2983型LTC2983输出温度,°C。
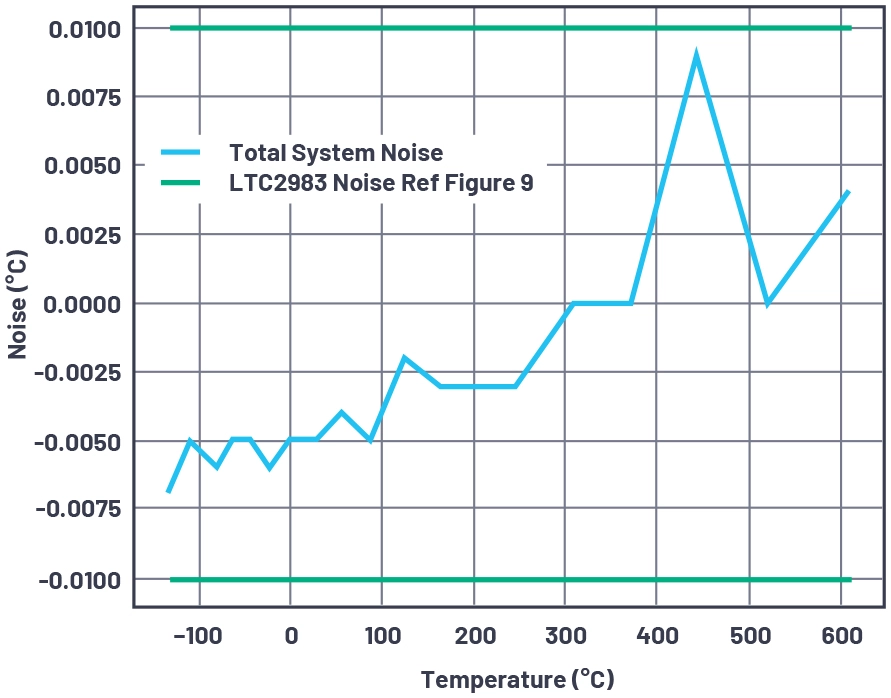
图8告诉,总系统峰间噪声不超过±0.01°C。该结果与数据表相符。
<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_fig-08.jpg" alt="">
图8。系统峰间噪声与温度的关系。

<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_fig-09.jpg" alt="">
图9。LTC2983对RTD温度测量的误差贡献。
<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_fig-10.jpg" alt="">
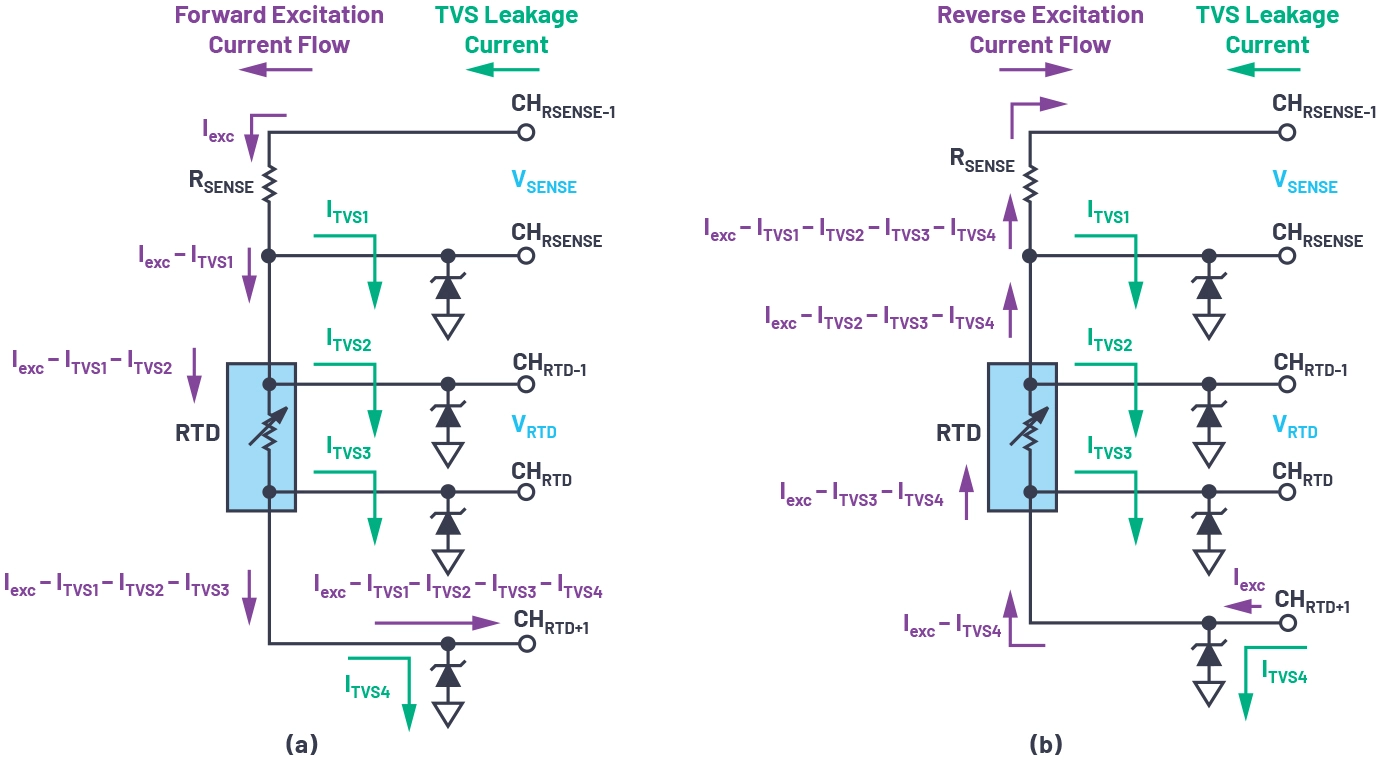
图10。励磁电流旋转配置:(a)正向励磁流量和(b)反向励磁流量。
TVS误差贡献和优化配置
您可以从设备的数据表中找到TVS的I-V曲线特性。然而,大多数TVS制造商只提供设备参数的典型值,而不是计算特定电压下TVS的误差贡献所需的所有I-V数据,尤其是漏电流误差。
本应用程序中使用了Littelfuse SMAJ5.0A TVS。在测试了一些样品后,我们发现在1 V反向电压下的泄漏电流约为1μA,远低于TVS数据表的最大反向泄漏。这种漏电流会给系统带来很大的误差。但如果LTC2983的励磁电流旋转被启用,泄漏误差效应将大大降低。图10显示了励磁电流旋转配置和TVS泄漏电流。
当R感觉与流经电阻式温度检测器的励磁电流、电阻式温度传感器的电阻R相同T,可以用[4]表示:

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-06.jpg">
当使用正向励磁流的励磁电流旋转配置时(如图10(a)所示),RTD电阻RRTD1型计算公式为:

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-07.jpg">

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-08.jpg">

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-09.jpg">
哪里:
R感觉是感应电阻器的实际电阻值
R实时数据处理是RTD在测量循环中的实际电阻值
五、传感器1是感应电阻器处测得的电压值
五、RTD1型如图10(a)所示,为正向励磁流量循环中RTD处的测量电压值。
RRTD1型是正向励磁流量循环中RTD的计算值
当使用反向励磁流的励磁电流旋转配置时(如图10(b)所示),RTD电阻RRTD2型计算公式为:

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-10.jpg">

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-11.jpg">

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-12.jpg">
哪里:
五、传感器2是感应电阻器的测量电压值。
五、RTD2型是反向励磁流量循环中RTD的测量电压值,如图10(b)所示。
RRTD2型是反向励磁流量循环中RTD的计算值。
根据TVS测量数据,在2V反向电压下,最大泄漏电流和最小泄漏电流之间的差平均约为10%。四个TVS的位置和匹配程度会在很大程度上引起系统误差。为了显示哪里的误差最大,我们可以假设电视是平均泄漏电流电视1=我电视2=0.9×I电视,而我电视3=我电视4=1.1×I电视.

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-13.jpg">

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-14.jpg">
如果未使用励磁电流旋转配置,RRTD1型或RRTD2型将包括最大TVS误差贡献。
<img data-lazy-fallback="1" decoding="async" style="width: 156px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-15.jpg" height="53">
或
<img data-lazy-fallback="1" decoding="async" loading="lazy" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-16.jpg" alt="" width="153" height="52">
是误差因素。
当使用励磁电流旋转配置时,最终计算结果为

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-17.jpg">

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-18.jpg">

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-19.jpg">

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-20.jpg">
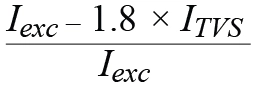
当错误(R无线电技术)=最小{错误(RRTD1型),错误(RRTD2型)},然后错误(R无线电技术)将等于Error(RRTD1型)或错误(R无线电技术)将等于Error(RRTD2型). 根据方程13至方程18,当I=6×I时电视,错误(R无线电技术)将等于最小{错误RRTD1型),错误RRTD2型}. 当我不包括=6×I电视,由于TVS泄漏电流,系统的精度将降低16.7%。
根据配置和测试结果不包括>6×I电视所以

<img data-lazy-fallback="1" decoding="async" style="width: 600px; margin-left: auto; margin-right: auto;" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_eq-21.jpg">
通常,我不包括>100×I电视。图11显示了系统错误,其中:
R无线电技术是励磁电流旋转时RTD电阻的最终计算结果。
错误(R无线电技术)是使用励磁电流旋转配置时的TVS误差贡献,单位为°C。
错误(RRTD1型)和错误(RRTD2型)是不使用旋转配置时的TVS误差贡献,单位为°C。
上述推导告诉我们,励磁电流旋转配置可以减少TVS泄漏电流误差的贡献。以下测试结果证实了我们的断言。
图11显示了不同励磁电流模式和TVS配置下的系统误差。如图所示,当不使用TVS时,旋转和非旋转配置的系统精度大致相同。然而,启用励磁电流旋转会自动消除寄生热电偶效应,其更详细的描述可在LTC2983数据表当使用TVS来保护系统时,总的系统误差会增加。但是,励磁电流旋转配置可以显著降低TVS泄漏电流的误差影响,从而有助于在大部分温度测量范围内实现与非TVS保护系统相似的精度水平。与没有TVS的系统相比,额外的误差是由TVS设备对设备的变化造成的。
<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230426/2202adi-rtd_fig-10.jpg" alt="">
图11。系统错误与不同的硬件和软件配置。
结论
温度测量系统的设计通常不被认为是一项艰巨的任务。然而,对于大多数系统设计者来说,开发一个高度准确和稳健的温度测量系统是一个挑战。LTC2983智能数字温度传感器可以帮助您克服这一挑战,并创造一种可以快速推向市场的产品。
本文介绍了一些特定配置的准确性和EMC性能测试结果。您可以选择不同的TVS设备和限流电阻器,以获得不同的测量精度和EMC性能,以满足您的生产要求。
工具书类
[1] 罗根·卡明斯。“具有位温度的鲁棒工业传感 家庭.”模拟创新杂志,第27卷,第1期。线性技术,2017年4月。
[2] Colm Slattery、Derrick Hartmann和Li Ke。”简化工业设计 带有PLC评估板的过程控制系统.”EE时间,2009年8月。
[3]CN0383:完全集成的2线、3线或4线RTD测量 使用低功耗、高精度、24位∑-ΔADC的系统Analog Devices,Inc.,股份有限公司,2020年10月。
[4] 汤姆·多曼斯基。“优化感测电阻器的成本和RTD温度的准确性 使用LTC2983 Temp to Bits IC时的测量“模拟设备,股份有限公司。
[本文中所有图形、表格和方程的来源均为Analog Devices。]
<img data-lazy-fallback="1" decoding="async" alt="" style="width: 150px; float: left; margin: 0px 4px 0px 0px;" src="https://uploads.9icnet.com/images/aritcle/20230426/ADI-Jon-Geng.jpg">
Jon耿2018年加入ADI,现在是中国中央应用中心的应用工程师。他的专业领域是开关、MXU、参考、温度传感器和烟雾探测。Jon于2018年在贵州大学获得机械工程硕士学位,并于2015年在河北师范大学获得电子工程学士学位。他可以在jon.geng@analog.com.

<img data-lazy-fallback="1" decoding="async" alt="" style="width: 150px; float: left; margin: 0px 4px 0px 0px;" src="https://uploads.9icnet.com/images/aritcle/20230426/ADI-Li-Ke.jpg">
李可是爱尔兰利默里克自动化和能源事业部的系统应用工程师。Li于2007年加入Analog Devices,在位于中国上海的Precision Converters Group担任产品应用工程师。在此之前,他在安捷伦科技公司的化学分析小组担任了四年的研发工程师。他于2003年获得西安交通大学生物医学工程硕士学位,1999年获得电气工程学士学位。他可以在ke.li@analog.com.

<img data-lazy-fallback="1" decoding="async" alt="" style="width: 150px; float: left; margin: 0px 4px 0px 0px;" src="https://uploads.9icnet.com/images/aritcle/20230426/ADI-Karl-Wei.jpg">
卡尔·魏2000年加入ADI,现在是中国中央应用团队的系统应用经理。他的专业领域是工业应用中的精确信号链。在此之前,他在IC测试开发工程和市场营销领域工作了8年。1992年,他毕业于中国哈尔滨工业大学,获得理学硕士学位。他可以在karl.wei@analog.com.