
什么是机器人传感器:工作原理及其应用
机器人是为多种目的开发的自动操作机器。机器人技术包括焊接、组装、监控、救援和恢复等。机器人设计中使用了不同类型的传感器。。。
机器人是为多种目的开发的自动操作机器。机器人技术包括焊接、组装、监控、救援和恢复等。在机器人设计中使用了不同类型的传感器来满足其特定要求,这些传感器被称为机器人传感器。机器人需要这些传感器,使其成为机械式的,以避免不确定性并获得更高的生产力。因此,如果没有传感器,机器人就是盲人和聋人。因此,本文讨论了机器人传感器、类型和应用程序。
什么是机器人传感器?
用于估计机器人的条件和环境的传感器被称为机器人传感器。这种传感器主要依赖于人体感觉器官的功能。因此,机器人需要大量关于周围环境的数据才能有效工作,如位置、距离、速度、尺寸、方向、加速度、力、温度、力矩、重量、亮度等。
机器人中的传感器允许对其环境做出响应,以执行复杂的任务。每个机器人都需要不同的传感器来控制自己,通过了解位置、身体运动及其部位的信息。
机器人传感器是如何工作的?
每个传感器的工作主要取决于换能原理,即能量转换。机器人内部的传感器使其能够以灵活的技术通过环境做出反应。通过在机器人中使用不同的传感器,它们能够观察和感知,从而执行不同的复杂任务。
机器人传感器测量机器人的状况和环境,然后以电子信号的形式通知机器人的控制器。因此,机器人需要不同的传感器来控制它们的动作。
机器人传感器特性
机器人传感器特性主要有助于在不同情况下为机器人确定合适的传感器。机器人传感器的一些必要特性如下所示。
- 精确
- 死区和滞后
- 标定
- 可重复性
- 决议
- 线性
- 漂流
- 温度
- 权力
- 可用温度
- 输出窗体
- 储存温度
- 光斑大小
- 可靠性
机器人传感器的类型
机器人传感器有以下讨论的不同类型。
光线传感器
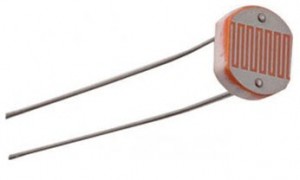
光传感器用于发现光线并产生电压差。机器人中使用的光传感器有两种类型的光伏电池和光刻胶。光伏电池用于将太阳辐射能量转换为电能,这些传感器用于太阳能机器人制造。光电电阻器用于通过改变光强度来改变其电阻。当光线更多时,阻力就会更小。这些光传感器并不昂贵,因此很容易在机器人中使用。
声音传感器
声音传感器主要用于检测声音并将其转换为电信号。这些传感器可以用于机器人在声音中导航。通过使用该传感器,可以实现通过声音控制的机器人。因此,机器人只需轻轻一拍就可以向右移动,只需轻轻两拍就可以向左转动。

温度传感器
温度传感器用于检测其周围温度的变化。该传感器主要根据温度变化的电压差变化原理来产生周围的等效温度值。

这些传感器也可以用于机器人,在冰川或沙漠等极端天气条件下工作。有不同类型的温度传感器IC可用于检测温度,如LM34、TMP37、TMP35、TMP36、LM35等。
接触式传感器
接触传感器也被称为触摸传感器,用于机器人技术。接触式传感器的主要功能是检测机械手和末端执行器关节处的速度、位置、加速度、扭矩或力的变化。这些传感器需要物理接触才能使机器人正常工作并采取相应行动。该传感器用于不同的开关,如限位开关、按钮开关和触觉保险杠开关。

这些传感器广泛应用于避障机器人中。一旦传感器检测到任何障碍物,它就会向机器人发送信号,使机器人执行不同的任务,如倒车、转弯或简单停止。
接近传感器
机器人中的接近传感器用于检测机器人附近的物体,也可以在没有任何物理接触的情况下测量机器人到某些物体的距离,但它们使用磁场来感测这些物体。这些传感器有两种类型的IR收发器、光致抗蚀剂和超声波传感器。

压力传感器
压力传感器用于检测压力,因此这些传感器被用于机器人,因为它们对触摸、压力和力有反应。该传感器用于设计机械手,以计算抓取物体所需的握力和力。

导航传感器
这些传感器也被称为定位传感器,用于机器人中检测其位置。最常用的导航传感器是GPS、定位和指南针。
GPS系统或全球定位系统对外部机器人非常有帮助,因为它只需分析从GPS卫星接收到的地图。

定位传感器帮助机器人识别自然地标和人工地标等外部元素,并处理它们的数据以定位它们的位置。
磁罗盘用于提供地球磁场的方向测量,以引导机器人朝着正确的方向到达目的地。与全球定位系统相比,这些传感器非常便宜。
加速度传感器
这些传感器用于测量加速度和倾斜。两种主要的力可以像静态力和动态力一样影响加速度计的工作。

两个物体之间的摩擦力被称为静态力,用于了解机器人倾斜的准确程度。移动物体所需的力被称为动力,用于估计必要的加速度。
陀螺仪
陀螺仪传感器或陀螺仪是一种用于通过角动量原理测量和帮助保持方向的传感器,或者陀螺仪用于计算特定轴区域的转速。当你想让你的机器人不依赖地球引力来维持方位时,这个传感器非常有用。

IMU传感器
IMU是一种IMU传感器,代表“惯性测量单元”,将陀螺仪、加速度计和磁强计等两个或多个传感器属性合并在一起,以计算速度、重力和方向力。

电压传感器
电压传感器用于将电压范围从低变为高。例如,运算放大器使用较少的电压,进行放大,并产生作为高电压的输出。一个简单的LED也可以作为电压传感器来感应电压差异并点亮。

电流传感器
电流传感器用于监测电路内的电流,并提供电流或比例电压等输出。大多数传感器的输出是0V至5V的模拟电压,可以在微控制器的帮助下进行进一步处理。

使用超声波传感器和Arduino板的地板清洁机器人
该项目的主要目标是设计一种自动家庭清洁机器人,通过检测障碍物、躲避和连续移动来清洁整个房间,直到整个房间被清洁。这个机器人连接了一把刷子来打扫房间。这里,该机器人使用红外传感器和超声波传感器,因为可以通过使用红外传感器来检测避障,而主要用于跌倒检测。
构建此项目所需的组件包括:;Arduino UNO R3,一把鞋刷,超声波传感器,Arduino电机驱动器护罩,电池,为Arduino供电的充电宝,苏格兰英式磨砂垫,电脑,轮式机器人底盘。
电路图
自动家庭清洁机器人的电路图如下所示。该电路设计非常简单,将超声波传感器连接到Arduino板上,并将电机驱动器的护罩定位到Arduiino上。
该电路中使用的超声波传感器是HC-SR04,用于测量具有稳定和高精度读数的距离。因此,它可以测量从1英寸到13英尺/2厘米到400厘米的距离。它在空气中产生40KHz频率的超声波信号。物体的距离可以根据超声波返回传感器所需的时间来测量。如果我们知道声音的时间和速度,那么我们就可以通过这个公式来确定距离。
距离=(时间x空气中的声速/2。
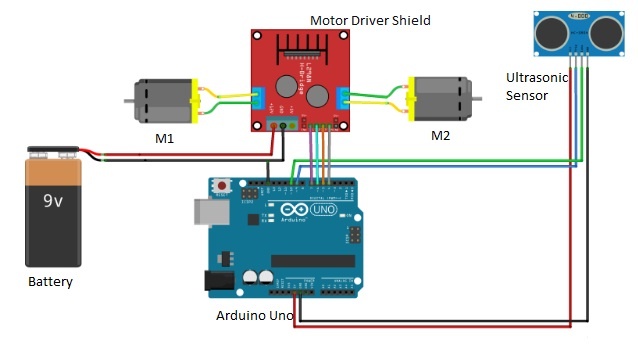
该电路的连接如下:;超声波传感器的Trig引脚直接连接到Arduino的第12引脚。Echo引脚直接连接到第13引脚,电压引脚连接到5V引脚,传感器的GND引脚连接到Arduino的GND针脚。
Trig和Echo等引脚都允许Arduino板与超声波传感器进行交互。在这里,电压和GND引脚为传感器供电,Echo和Trig引脚允许传感器通过Arduino板传输和接收数据。
电机屏蔽必须至少包括两个输出&它们应连接到两个电机。通常,这两个输出被标记为M1和M2。将您的电池和充电宝相应地连接到Arduino和电机护罩。
程序
#包括<AFMotor.h>
#定义trigPin 12
#定义echoPin 13
AF_DC电动机1(1,电动机12_64KHZ);
AF_DC电动机2(2,电动机12_8KHZ);
无效设置(){
引脚模式(trigPin,OUTPUT);
pin模式(echoPin,INPUT);
}
空心环(){
持续时间长,距离远;
digitalWrite(触发引脚,低电平);
延迟微秒(2);
digitalWrite(触发引脚,高电平);
延迟微秒(10);
digitalWrite(触发引脚,低电平);
持续时间=脉冲In(echoPin,HIGH);
距离=(持续时间/2)/29.1;
如果(距离<20){
电机1.setSpeed(255);
motor2.设置速度(0);
电机1.运行(后退);
电机2.运行(后退);
延迟(2000年)//根据机器人的转动方式进行更改。
}
其他{
电机1.setSpeed(160)//根据你的机器人应该跑多快来改变这个。
电机2.setSpeed(160)//将其更改为与您在上面输入的值相同的值。
电机1.运行(前进);
电机2.运行(前进);
}
}
首先,我们需要安装Adafruit电机屏蔽库来驱动这两台电机。这里使用的是L293D电机驱动程序屏蔽,因此需要下载电机库,并将其包含在“Arduino IDE库文件夹”中。
打开Arduino IDE,将上面完整的Arduino代码粘贴到IDE中。之后,需要将您的Arduino板连接到计算机。在“工具”或“端口”中选择端口,然后单击“上载”按钮。检查房间清洁机器人。如果这个机器人旋转得很慢或很快,那么就尝试延迟,以获得完美的结果。
优势
这个机器人传感器的优势包括以下内容。
- 它提高了产品质量
- 它提高了应用程序的准确性
- 它扩展了机器人范围的应用
- 它提高了工作人员的安全。
- 响应时间很快
- 感应范围长
- 低成本
- 耐恶劣环境
- 易于安装
- 极易预测
缺点
这个机器人传感器的缺点包括以下内容。
- 需要通过目标进行身体接触
- 触点跳动
- 探测范围将受到物镜颜色和反射率的影响
- 对严重的生态变化非常敏感
- 对温度变化作出响应
传感器在机器人中的应用
这个机器人传感器的应用包括以下内容。
- 机器人传感器主要用于估计机器人的状况和环境。
- 这些传感器确保了机器人的平稳工作。
- 机器人传感器帮助机器人对接收到的命令做出响应。
- 这些传感器可以轻松完成不同的任务。了解周围环境可以帮助机器人决定物体的接近程度、温度、化学反应、声音,并相应地执行。
- 机器人技术中的传感器需要获得具有高效质量、快速响应、准确性和成本效益的可靠解决方案。
因此,这一切都是关于机器人传感器、类型、工作及其应用的概述。这里有一个问题要问你,汽车中使用的传感器有哪些?