
在ISSCC上,IMEC公布了用于短程雷达的电荷泵PLL设计
在本周的第70届ISSCC年度活动上,研究公司IMEC将展示一种针对汽车和工业雷达系统的锁相环(PLL)IC设计。2023年2月20日Jeff Child
今天,总部位于比利时的研发组织IMEC公布了他们将在本周的2023年国际固态电路大会(ISSCC)上展示的一种新型锁相环(PLL)IC设计的细节。
根据IMEC的说法,新设备是一种数字校准的电荷泵(CP)PLL,旨在为毫米波雷达生成高质量的调频连续波(FMCW)信号。应用包括下一代短程汽车(车内和车外)和工业系统,如协作机器人的雷达。
IMEC的校准电荷泵(CP)PLL IC设计用于为毫米波雷达生成FMCW信号。
在这篇文章中,我们研究了IMEC PLL设计背后的思想,并分享了我们采访IMEC Fellow Jan Craninckx时的见解。
对更快雷达“啁啾”的无尽渴望
根据Craninckx的说法,FMCW雷达的核心是调频正弦波。这类雷达发射的正弦波的频率随时间线性增加。这种信号的扫频在雷达术语中被称为“啁啾”。
一旦雷达信号被物体反射,该信号就被接收器拾取并与原始啁啾信号混合。根据这些信息,可以确定物体的距离和速度。
正如Craninckx所解释的,雷达信号的质量水平在很大程度上取决于用于生成线性调频信号的PLL的性能。Craninckx说:“雷达的许多精度、范围和噪声——基本上所有性能方面——都取决于它能产生的线性频率的清洁程度,包括啁啾。”。
考虑到这一切,Craninckx表示,IMEC的新型PLL可以产生以16GHz为中心的高度线性、高质量的啁啾信号,啁啾带宽为1.5GHz。他说,这种性能水平是由市场驱动的,包括汽车和工业雷达,在这些市场上,人们对快速、准确、线性啁啾的需求几乎是无穷无尽的
“他们想要的性能是非常线性的,非常快速的,在很宽的频率范围内,”他说。“此外,世界正在转向多天线雷达,这意味着有15个或更多的接收器都使用相同的PLL传感器阵列。
“为了在所有接收间歇信道上提供正确的信号,并让它们一起等待,这肯定需要快速的啁啾时间。”
Craninckx表示,通过IMEC的PLL设计,一项关键成就是将啁啾速度降至12µs,但频率调制的均方根误差为41 kHz(均方根调频误差)。此外,PLL能够实现小于1µs的超快速启动时间,啁啾之间的重置时间为1µs。
功率效率占空比与CMOS工艺
巧妙地管理PLL的啁啾生成也是提高设备功率效率的关键。PLL的啁啾发生器以占空比模式工作,在断电前在一个突发中合成N个啁啾。这导致了显著的功率节省,因为它很好地利用了时间。
例如,PLL在50%和1%占空比模式下分别工作时仅消耗9.2 mW和1.48 mW。Craninckx说,即使在断电模式之后,第一个啁啾的均方根调频误差仍保持在41 kHz以下。
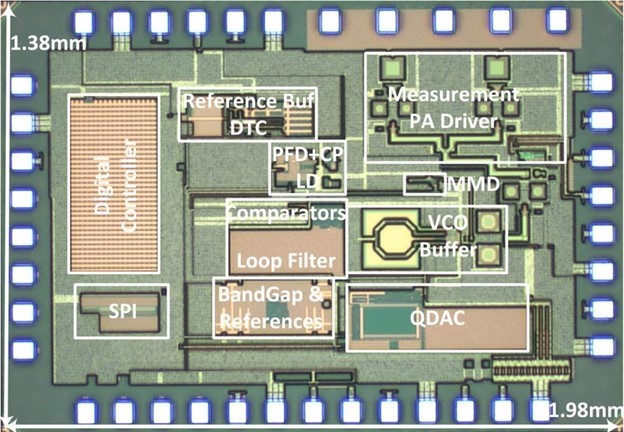
内置28纳米CMOS,如图所示为0.6毫米以下的CP-PLL管芯2.有源核心区PFD=相位频率检测器;VCO=压控振荡器;QDAC=电荷积分数模转换器。
实现这种占空比性能的关键是使用基于电荷泵(CP)的PLL架构。该器件采用28纳米CMOS技术制造,易于制造。该CMOS技术通过相位偏移补偿时间-数字转换器(POC-DTC)进行扩展,以便于快速自校准。
适用于近距离雷达
在本周的ISSCC上,IMEC将展示一个功能演示,该演示将其CP-PLL与IMEC现有的140GHz雷达接收机和发射机模块集成在一起。该演示旨在展示该技术在未来汽车和工业应用中的潜力。
在汽车方面,这包括范围高达几十米的短程汽车雷达应用,例如车内雷达传感器,用于监测驾驶员和乘客的存在、移动和健康状况。IMEC表示,它也非常适合车外汽车传感器,如停车辅助或车辆检测。

这里展示的是IMEC在本周的ISSCC上展示的140 MHz雷达演示平台。它将新型PLL与IMEC的雷达发射机和接收机模块相结合。
根据IMEC的说法,PLL也适用于机器人雷达应用。cobot雷达传感器就是一个例子。这种雷达可以提高工业环境中人机交互的安全性和效率。
另一个使用案例是安装在小型移动物体或无人机等车辆上的雷达传感器。重要的是,PLL还可以用于上变频到具有其他载波频率的毫米波雷达信号,例如80GHz。
IMEC提供的所有图像