
2022年传感器融合新技术演示,激光雷达的未来看起来很光明
All About Circuits团队回顾了本周在硅谷举行的Sensors Converge会议上的许多新激光雷达技术演示中的几项。2022年6月29日作者:Dale Wilson
随着技术的不断进步和成本的降低,激光雷达的应用可能会急剧增加。在2022年Sensors Converge大会上,激光雷达公司正在展示用于汽车、机器人、无人机、智能城市、物流甚至道路维修等应用的惊人技术。
在这篇文章中,让我们深入了解今年会议上演示的一些技术。
XenomatiX真固态激光雷达
我们将深入研究的第一家公司是XenomatiX。XenomatiX的销售和业务开发经理Jacobo Alaimo在描述XenomatiX激光雷达或“XenoLidar-X”产品时强调:“这不是固态激光雷达;这是真正的固态激光雷达。”。与竞争对手的不同之处在于,XenomotiX没有使用机械扫描甚至微镜来创建3D点云。
相反,XenomatiX使用数千个VCSEL(垂直腔表面发射激光器)在一次闪光中绘制场景。全局快门使他们能够通过CMOS图像传感器的单个快照收集完整的数据帧。

XenomatiX屡获殊荣的真正固态激光雷达传感器系统。图像由XenomatiX提供
CMOS图像传感器不仅接收激光雷达光子以生成3D地形点云,而且还用于捕获2D视觉背景图像。3D点云和2D图像可以被叠加以提供额外的场景信息,或者与传感器融合相结合以改进对象检测。
2D视觉图像信息也用于降噪。通过标准图像捕获收集的环境光提供了可以在3D激光雷达光子收集期间减去的背景照明基线。
在下面显示的会议显示器中,旧一代XenomatiX激光雷达系统位于其展位上方,在墙上的监视器上提供实时点云显示。总的来说,大约50米外的墙上的特征清晰可见。

安装在展台上方的XenomatiX激光雷达提供了Sensors Converge会议的实时点云。
最初,XenomatiX专注于激光雷达在200米范围内的ADAS系统的远场应用。然而,它最近扩大了近场应用的范围,包括“汽车、工业、机器人和智能城市”,Alaimo说。
Alaimo在Sensor Converge会议上向我们描述了XenomatiX激光雷达最有趣的两个用途,涉及以毫米精度绘制道路表面。首先,展望行驶中的汽车,它可以生成详细的地形图,并将其提供给悬架系统,以提供更平稳的行驶。

XenomatiX的Jacobo Alaimo解释了使用激光雷达进行路面测绘。
其次,可以利用路面拓扑结构来改善摊铺过程。
正如Alaimo所解释的:
“铺设时有非常严格的厚度要求。如果最终表面不够平坦,施工公司必须重新铺设所有东西。当这种情况发生时,他们可能会花费近数十亿美元。”
通过在重新铺设过程之前和过程中进行精确测绘,可以使用更少的铺路材料来平滑表面,并且可以在叶片铺设过程中进行更好的校正。两者都有可能降低成本,生产更好的道路。
PreAct的软件定义近场闪光激光雷达
虽然ADAS(高级驾驶员监控系统)的大部分工作都集中在远场碰撞预防上,但PreAct Technologies正在将其连续波近场闪光雷达技术应用于即将发生的碰撞检测。凭借低成本、高帧速率和高精度,它希望有一天能在不可避免的碰撞发生之前为汽车安全系统提供宝贵的几毫秒警告。
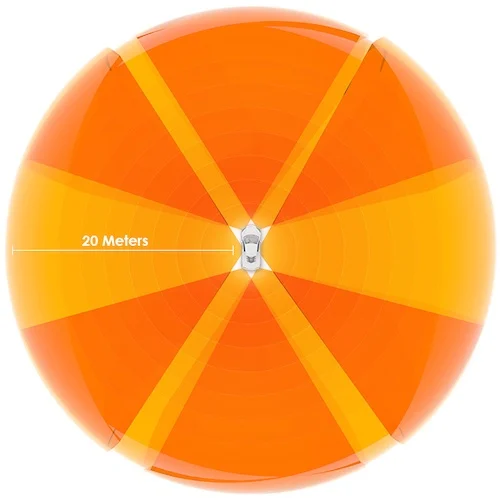
近场激光雷达可以在20米外提供即将发生的碰撞探测。图片由PreAct Technologies提供
在本次会议上,我们会见了PreAct Technologies的创始人兼首席执行官Paul Drysch,不久之后,其T30P Flash LiDAR在周二的Sensors Converge会议上获得了汽车/自主技术领域的最佳传感器奖。很自然,我们问他为什么这些额外的毫秒很重要。其中一些答案令人惊讶。
首先,你可以启动更大的安全气囊,使其充气更慢。更大甚至多级的安全气囊可以为乘客提供额外的保护,而较慢的充气率将减少目前由安全气囊充气造成的伤害。
这些宝贵的毫秒的另一个用途是将窗口降低一点。Drysch解释道:“信不信由你,人们会因为某些车祸造成的压力而吹耳膜。”。
如果系统检测到即将发生侧面碰撞,电子悬架可以将车辆倾斜几度,使车架而不是车门承受更多的冲击。你将冲击能量从汽车最薄弱的部分之一转移到最强大的部分之一。
经过近四年的硬件和软件开发,PreAct计划于8月发布其首款产品,声称:
“我们在汽车领域的全部目标是取代传统的近场传感器——超声波传感器、短程雷达,在某些情况下甚至是RGB相机。”
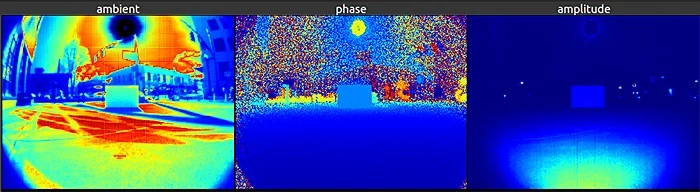
来自连续波近场激光雷达的图像。图片由PreAct Technologies提供
其独特的方法是使用标准组件,包括现成的飞行时间传感器和LED发射器,而不是激光来检测1厘米到20米的物体。该公司希望该系统价格低廉,但性能高。
“一天下来,有一个处理器、一个成像芯片、一些LED发射器、一个带外壳的镜头和一个将其连接在一起的PCB。”
Drysch承认,其他人也尝试过这种方法,但没有取得多大成功。明亮的户外设置是940纳米光探测系统的“克星”;然而,该公司声称已经能够克服这一障碍。它使用低端FPGA(现场可编程门阵列)进行图像处理,以创建点云深度图,并为感知层提供对象分类算法。
Drysch在会议上展示的设计有10个LED发射器,它们成对工作,提供区域照明。这支持您想要在视野中高亮显示不同对象的用例。用户可以配置他们想要如何点亮这些LED,以最适合他们的应用。
虽然PreAct的主要关注点是汽车行业,但它也看到了自动移动机器人(ARM)的机会。通过提供更好的物体检测、更高的分辨率和更远的距离,这些系统可以更快地移动,更安全地运行。
如今工厂里的许多机器人将包括一个激光雷达、几个摄像头和一个超声波传感器,以提供环境和障碍物检测。PreAct相信,它可以用一到两个软件定义的激光雷达系统来取代所有这些系统,这些系统可以单独提供水平方向108度和垂直方向81度的视场。
Mirrorcle的3D激光雷达和机器人与人的意向通信
在与Microchip的合作中,Mirrorcle展示了一款将其激光雷达成像产品与矢量图形激光投影(VGLP)技术相结合的机器人。激光雷达使用大角度MEMs反射镜来扫描激光雷达以创建场景信息。
虽然机器人的移动受到小展台表面的限制,但VGLP在表面上投射出充满活力的多色信息和方向轨迹信息。这是机器人与人类交流的一个例子。这个想法是,移动的机器人可以在人内和周围移动时,将其“意图”投射到前方的地板上。
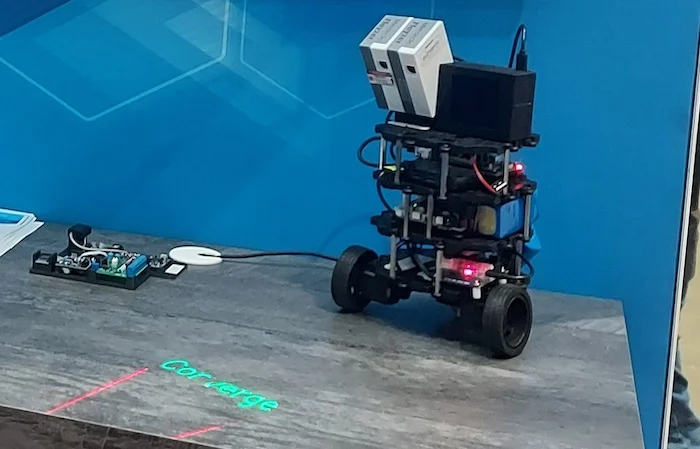
Mirrorcle的RGB矢量图形激光投影仪提供机器人意图信息。
在演示中,红线将在表面上显示一条弯曲的轨迹,指示机器人未来的移动方向。绿色文本提供文本信息。这是一个有趣的视角,展示了机器人和人类如何在彼此靠近的地方更高效、更安全地工作。
激光雷达使道路超越车辆
虽然用于自动驾驶应用中的远程传感的激光雷达将继续获得大量投资和关注,但Sensors Converge的演示表明,还有更多的行业和应用将从这组技术中受益。