
受蝠鲼启发,“蝴蝶机器人”是迄今为止游泳速度最快的软体机器人
北卡罗来纳州的研究人员以蝶泳和蝠鲼为灵感,开发了一种游泳机器人。2022年11月30日作者:Aaron Carman
在机器人日益扩散的时代,北卡罗来纳州的研究人员开发了一种“蝴蝶机器人”,使下一代机器人能够在水中操作。尽管名字叫蝴蝶机器人,但它不是一种空中机器人,而是一种模仿蝠鲼游泳模式的高效游泳机器人。
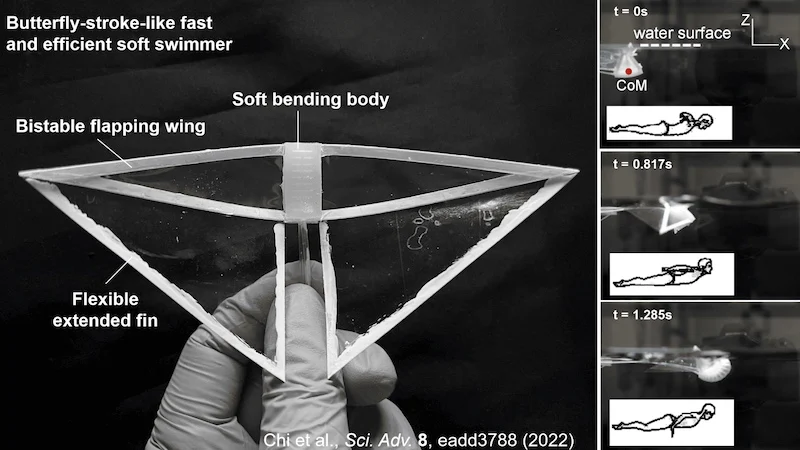
蝴蝶机器人的系统级图突出显示了机器人的主要组件。柔软的身体包含一个致动器,由于有翅膀和鳍,该致动器可以有效地推动机器人。图片由NC State提供
蝴蝶机器人以蝶泳命名,其最高速度是以前的游泳机器人的四倍,同时使用相对简单的设计。北卡罗来纳州立大学小组开发了两个原型,每个原型都有自己的优势。本文对蝴蝶机器人背后的技术进行了更深入的研究。
像蝴蝶一样漂浮
由Jie Yin博士领导的北卡罗来纳州立大学研究小组从蝠鲼这一小型但快速的海洋生物中获得了灵感,他们注意到,在自然界中经常看到的高效“拍打”运动在仿生设计中几乎没有那么有效。虽然海洋动物通常可以达到每秒超过一个体长(BL/s)的速度,但以前的设计无法超越这一里程碑。此外,它们的效率较低,使用起来不切实际。
考虑到奥卡姆剃刀,北卡罗来纳州立大学小组开发了一种优雅的游泳机器人,它利用蝠鲼的“拍打”运动。蝴蝶机器人不依赖分布式复杂的电气或液压系统,而是依靠双稳态柔性机翼来产生向前运动。双稳态翅膀,就像发夹一样,有两种稳定状态。通过添加足够的外部刺激,可以“切换”状态,这通常伴随着储存能量的快速释放。

软体弯曲角度和翅膀旋转角度之间的关系证明了蝴蝶机器人中使用的双稳态原理。一旦达到临界角度,翅膀就会进入新的稳定状态。图片由NC State提供
双稳态机翼为Butterfly Bot提供了几个优势,包括系统复杂性和原始性能。关于系统复杂性,机翼可以很容易地组装,每个机翼只需要一个胶合接头。驱动机翼是微不足道的,需要一个中央驱动单元,可以同时控制多个机翼的位置(尽管不是独立的)。在第一次蝴蝶机器人飞行中,机翼的峰值速度为6.6米/秒,峰值加速度为1.49 x 103米/秒2..
像蝠鲼一样游泳
为了进一步模仿蝠鲼的运动,在翅膀的背面添加了一个柔性鳍,使“襟翼”沿着鳍的长度继续向下移动,产生向前的运动,使蝴蝶机器人不仅可以游泳,而且可以有效地游泳。
为了评估蝴蝶机器人的有效性,使用了两个主要指标:最高速度和斯特劳哈尔数。最高速度通常以BL/s为单位测量,因为较大的物体自然会表现出较大的峰值速度,而斯特劳哈尔数是表示功率效率的无量纲测量。自然界中的斯特劳哈尔数通常在0.2到0.4之间,这使得这一范围成为研究的目标。
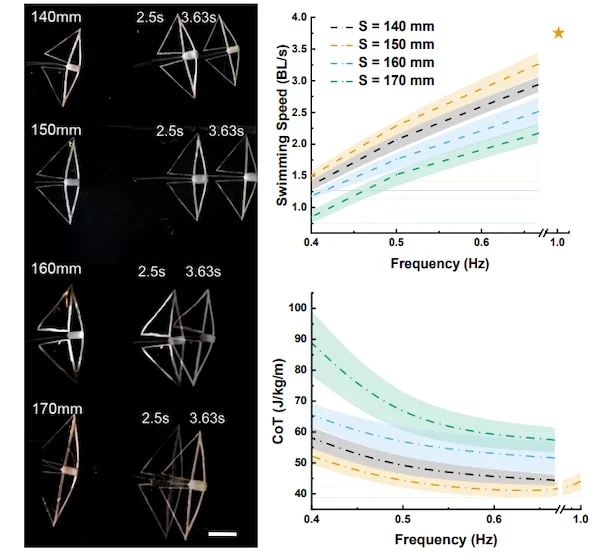
频率-速度/效率关系表明,在约0.67Hz时实现了最大效率,但通过增加致动频率可以观察到速度的增加。图片由NC State提供
对于第一个蝴蝶机器人,研究人员观察到最高速度为3.74 BL/s,驱动压力为55 kPa,驱动频率为1 Hz。值得注意的是,不同的致动频率自然会产生不同的速度和能量效率(就像我们在冲刺时达到了更高的速度,但消耗能量的速度要快得多)。峰值效率出现在0.67Hz的致动频率下,相关速度为3.4BL/s。
到目前为止,研究人员只使用了一个单独的致动器来控制两翼。这创建了最简单的系统体系结构,同时将运动限制在一条线上。然而,北卡罗来纳州立大学的小组希望蝴蝶机器人能够转动。因此,研究人员组装了第二个机器人,这次有两个致动器,以独立控制机翼。通过拍打单个翅膀,机器人可以转动,同时拍打翅膀可以增强机器人的机动性。
海洋:机器人的最后前沿
北卡罗来纳州立大学小组以真正的科学方式意识到,尽管蝴蝶机器人取得了令人印象深刻的成就,但要改善它们的水生生物创造,还有更多的工作要做。对速度的主要限制因素之一是致动器的带宽。在当前状态下,致动器被限制在大约1Hz,而机翼的固有频率大约为13.5Hz。如果机器人要实现更高的速度,开发人员必须增加“拍打”频率,以提供最大的推动力。此外,研究人员确定了系留式空气供应和未优化的机翼形状,以改进未来的设计。
尽管目前存在这些设计挑战,但蝴蝶机器人已经引入了在水生环境中增加机器人存在的可能性。随着自动驾驶汽车、包裹递送无人机和无人卫星的出现,海洋似乎已经成为机器人技术的最后前沿。